 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
在存在AR(1)自相关的情形下,用什么估计方法能够得到BLUE估计量?简述这个方法的具体步骤。
在存在AR(1)自相关的情形下,用什么估计方法能够得到BLUE估计量?简述这个方法的具体步骤。
提问人:网友anonymity
发布时间:2022-01-07
题目内容
(请给出正确答案)
在存在AR(1)自相关的情形下,用什么估计方法能够得到BLUE估计量?简述这个方法的具体步骤。
 更多“在存在AR(1)自相关的情形下,用什么估计方法能够得到BLU…”相关的问题
更多“在存在AR(1)自相关的情形下,用什么估计方法能够得到BLU…”相关的问题
A、用OLS估计得到的模型残差对其一阶滞后进行回归,一阶滞后的参数估计量作为ρ的估计量。
B、通过DW统计量来计算,即r=1-DW/2。
C、直接计算模型残差与其一阶滞后的简单相关系数。
D、用被解释变量与其一阶滞后回归,一阶滞后的参数估计量作为ρ的估计量。

及AR(1)模式

于是科克伦和奥克特推荐如下步腺来估计ρ。
(1)用通常的OLS方法估计方程①并得到残差ut。顺便指出,你可以在模型中包含不止一个X变量。
(2)利用第1步得到的残差做如下回归:

这是方程②在实证中的对应表达式。
(3)利用方程③中得到的 ,估计广义差分方程(129.6)。
,估计广义差分方程(129.6)。
(4)由于事先不知道方程③中得到的 是不是ρ的最佳估计值,所以把第3步中得到的
是不是ρ的最佳估计值,所以把第3步中得到的 值代入原回归①,并得到新的残差解
值代入原回归①,并得到新的残差解 为
为


(5)现在估计如下回归

它类似于方程③,并给出p的第二轮估计值。由于我们不知道p的第二轮估计值是不是真实p的最佳估计值,所以我们进入第三轮估计,如此等等。这正是科克伦-奧克特程序被称为迭代程序的原因。我们该把这种(愉快的)轮回操作进行到什么程度呢?一般的建议是,当p的两个相邻估计值相差很小(比如不是0.01或0.005)时,便可停止迭代。在工资-生产率一例中,在停止之前约需要3次迭代。
a.利用科克伦-奥克特迭代程序,估计工资生产率回归(12.5.2)的p.在得到ρ的“最终”估计值之前需要多少次迭代?
b.利用a中得到的p的最终估计值,在去掉第一次观测和保留第一次观测的情况下,估计工资生产率回归。结果有何差异?
c.你认为在变换数据以解决自相关问题时保留第一次观测重要吗?
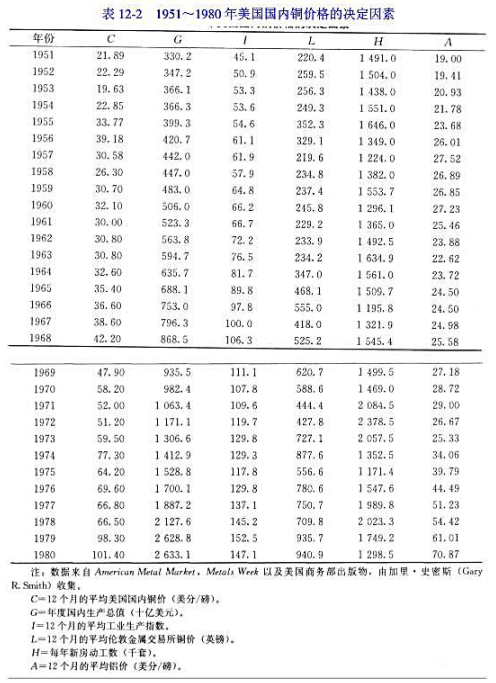
(1)a.根据这些数据,估计以下回归模型: ,并解释所得结果。
,并解释所得结果。
b.求出上述回归的残差和标准化残差并作图。你能对这些残差中是否有自回归做些什么猜测?
c.估计德宾-沃森d统计量并对数据中可能出现的自相关性质作出评论。
d.做游程检验,看你的答案是否不同于刚才在c中所得到的结果。
e.你怎样辨别AR(p)过程是否比AR(1)过程更好地描述自相关?
(2)如果该题的结果表明存在序列相关:
a.用科克伦-奥克特两步程序,估计可行GLS或广义差分回归,并比较你所得的结果。
b.如果估计自a的科克伦-奥克特法的ρ值和从d统计量估计得的结果相差较大,你将选择哪一个估计ρ的方法,为什么?
A、德宾-沃森d统计量的取值在-1和+1之间。
B、德宾-沃森d检验假定误差项具有同方差性。
C、德宾-沃森d检验只能检验一阶序列相关。
D、序列相关违背的是关于随机干扰项和解释变量的假定
Y1t=A1+A2Y2t+A3X1t+u1t
Y2t=B1+B2Y1t+u2t
式中,Y是内生变量;X是外生变量;u是随机误差项。根据这个模型,得到简化形式的回归模型如下:
Y1t=6+8X1t
Y2t=4+12X1t




为了保护您的账号安全,请在“简答题”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 简答题
微信搜一搜
简答题
简答题
微信搜一搜
简答题

 如搜索结果不匹配,请
如搜索结果不匹配,请 










