 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
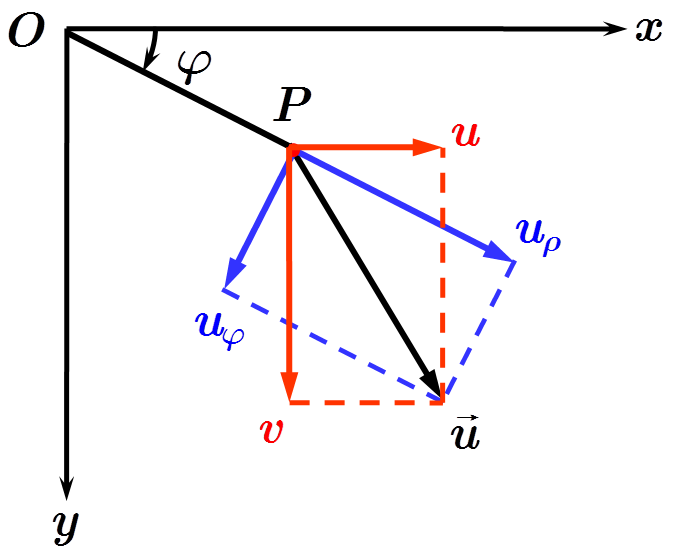
矢量控制的关键是静止坐标系和旋转坐标系之间的坐标变换,实现该变换的关键是找到两坐标系之间的()。
提问人:网友wu30wu0002
发布时间:2022-01-07
题目内容
(请给出正确答案)
 更多“矢量控制的关键是静止坐标系和旋转坐标系之间的坐标变换,实现该…”相关的问题
更多“矢量控制的关键是静止坐标系和旋转坐标系之间的坐标变换,实现该…”相关的问题
A.地面坐标系向弹体坐标系的变换,以及速度坐标系向弹体坐标系的变换都是顺变换。
B.地面坐标系向弹体坐标系的变换,以及速度坐标系向弹体坐标系的变换都是逆变换。
C.地面坐标系向弹体坐标系的变换是逆变换,而速度坐标系向弹体坐标系的变换是顺变换。
D.地面坐标系向弹体坐标系的变换是顺变换,而速度坐标系向弹体坐标系的变换是逆变换。
 根据本课所学,(1)建立如下机械手的坐标系;(2)写出其DH表格;(3)写出其{0}->{1}坐标系、{1}->{2}坐标系、{2}->{3}坐标系之间的变换矩阵,以及基坐标{0}至机械手末端{3}坐标系的变换矩阵、基坐标系{0}至工具P点的变换矩阵
根据本课所学,(1)建立如下机械手的坐标系;(2)写出其DH表格;(3)写出其{0}->{1}坐标系、{1}->{2}坐标系、{2}->{3}坐标系之间的变换矩阵,以及基坐标{0}至机械手末端{3}坐标系的变换矩阵、基坐标系{0}至工具P点的变换矩阵 点击查看答案
点击查看答案
A.经过2次初等旋转变换,即可使两个坐标系完全重合
B.经过1次初等旋转变换,即可使两个坐标系完全重合
C.仅通过初等旋转变换,不能使两个坐标系完全重合
D.至少经过3次初等旋转变换,才可使两个坐标系完全重合




为了保护您的账号安全,请在“简答题”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 简答题
微信搜一搜
简答题
简答题
微信搜一搜
简答题

 如搜索结果不匹配,请
如搜索结果不匹配,请 
 请证明
请证明 (长度平方)是标量.
(长度平方)是标量.









