题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
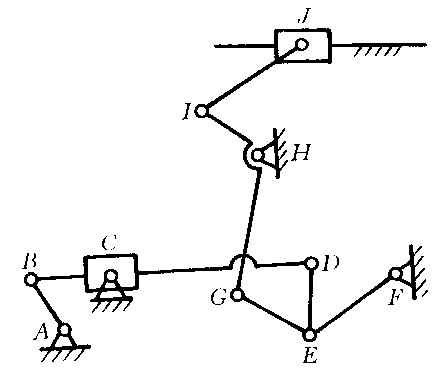
何谓机构的组成原理?何谓基本杆组?它具有什么特性?如何确定基本杆组的级别及机构的级别?
提问人:网友anonymity
发布时间:2022-01-07
题目内容
(请给出正确答案)
 更多“何谓机构的组成原理?何谓基本杆组?它具有什么特性?如何确定基…”相关的问题
更多“何谓机构的组成原理?何谓基本杆组?它具有什么特性?如何确定基…”相关的问题
一、判断题(每题2分,共30分) 1.在平面机构中,一个高副引入两个约束。 ( ) 2.移动副和转动副所引入的约束数目相等。 ( ) 3.一切自由度不为一的机构都不可能有确定的运动。 ( ) 4.一个作平面运动的自由构件有六个自由度。 ( ) 5.瞬心即彼此作一般平面运动的两构件上的瞬时等速重合点或瞬时相对速度为零的重合点。 ( ) 6.以转动副相连的两构件的瞬心在转动副的中心处。 ( ) 7.以平面高副相连接的两构件的瞬心,当高副两元素作纯滚动时位于接触点的切线上。 ( ) 8.矢量方程图解法依据的基本原理是运动合成原理。 ( ) 9.加速度影像原理适用于整个机构。 ( ) 10.惯性力是构件在作变速运动时产生的。 ( ) 11.自锁是机械的固有属性,所以机械都有自锁现象。 ( ) 12.任何一种曲柄滑块机构,当曲柄为原动件时,它的行程速比系数等于1。 ( ) 13.在铰链四杆机构中,凡是双曲柄机构,其杆长必须满足:最短杆与最长杆杆长之和大于其他两杆杆长之和。 ( ) 14.任何平面四杆机构出现死点时,都是不利的,因此应设法避免。 ( ) 15.在铰链四杆机构中,如存在曲柄,则曲柄一定为最短杆。 ( )
二、单选题(每题2分,共20分) 1.两构件构成运动副的主要特征是( )。 A.两构件以点线面相接触 B.两构件能作相对运动 C.两构件相连接 D.两构件既连接又能作一定的相对运动 2.机构的运动简图与( )无关。 A.构件数目 B.运动副的类型 C.运动副的相对位置 D.构件和运动副的结构 3.用一个平面低副连接两个做平面运动的构件所形成的运动链共有( )个自由度。 A.3 B.4 C.5 D.6 4.有两个平面机构的自由度都等于1,现用一个有两铰链的运动构件将它们串成一个平面机构,这时自由度等于( )。 A.0 B.1 C.2 D.3 5.Ⅲ级杆组应由( )组成。 A.三个构件和六个低副 B.四个构件和六个低副 C.二个构件和三个低副 D.机架和原动件 6.确定不通过运动副直接相连的两构件的瞬心,除了运用概念法外,还需要借助( )。 A.三心定理 B.相对运动原理 C.速度影像原理 D.加速度影像原理 7. 平面连杆机构的曲柄为主动件,则机构的传动角是( ) 。 A.摇杆两个极限位置之间的夹角 B.连杆与曲柄之间所夹的锐角 C.连杆与摇杆之间所夹的锐角 D.摇杆与机架之间所夹的锐角 8. 曲柄摇杆机构,当( )时,机构处于极限位置。 A.曲柄与机架共线 B.摇杆与机架共线 C.曲柄与连杆共线 D.摇杆与连杆共线 9. 在平面连杆机构中,欲使作往复运动的输出构件具有急回特性,则输出构件的行程速比系数K( )。 A.大于1 B.小于1 C.等于1 D.等于2 10. 平面四杆机构中,是否存在死点,取决于( )是否与连杆共线。 A.主动件 B.从动件 C.机架 D.摇杆
A、双方在观点、利益和行为方式等方面既相互联系又相互冲突或差别。
B、在于一方企图说服另一方或理解、或允许、或接受自己所提出的观点。
C、是双方在物质力量、人格、地位等方面都相对独立或对等。
D、是人际关系的一种特殊表现。




为了保护您的账号安全,请在“简答题”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 简答题
微信搜一搜
简答题
简答题
微信搜一搜
简答题

 如搜索结果不匹配,请
如搜索结果不匹配,请