题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
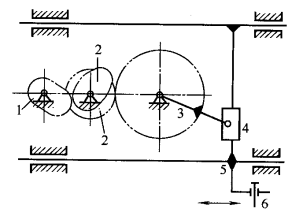
图7为利用齿轮齿条机构的串联实现增大输出件行程的实例。整个机构由两个齿轮齿条机构3-1和齿轮齿
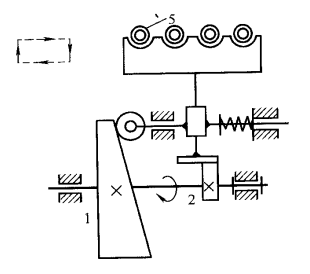
7. 图7为利用齿轮齿条机构的串联实现增大输出件行程的实例。整个机构由两个齿轮齿条机构3-1和齿轮齿条机构2-5串联组合而成。齿条1固定在机架上,活动齿条2安装在移动台上,同轴齿轮3和5分别与齿条1和齿条2啮合,气缸4中活塞杆作为机构的输入构件,推动齿轮3在固定齿条1上滚动,齿轮5带动活动齿条2移动。活动齿条2的行程(A为活塞行程),显然,齿条2的行程大于活塞杆的行程。但是应该注意,该机构在行程被放大的同时速度也被放大,所以必要时应考虑速度缓冲问题。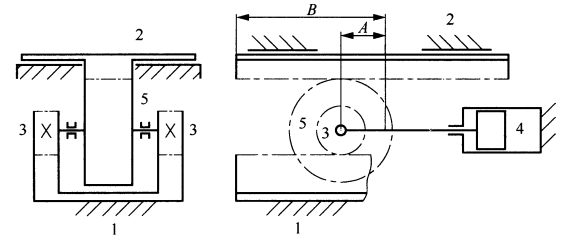
提问人:网友aoyoudeyu
发布时间:2022-01-07

 如搜索结果不匹配,请
如搜索结果不匹配,请