 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
测距机的所测距离是通过()方式实现的.
A.地面台询问,机载设备应答
B. 机载设备询问,地面台应答
C. 本机询问,其他飞机应答
D. 接收地面反射波
提问人:网友softtesting
发布时间:2022-01-06
题目内容
(请给出正确答案)
A.地面台询问,机载设备应答
B. 机载设备询问,地面台应答
C. 本机询问,其他飞机应答
D. 接收地面反射波
 更多“测距机的所测距离是通过()方式实现的.”相关的问题
更多“测距机的所测距离是通过()方式实现的.”相关的问题
光电测距是通过测量光波在待测距离上往返()次所经历的时间,来确定两点之间的距离。
A.一
B.两
C.三
D.四
A.高程
B.三维坐标
C.距离
D.平面坐标
A、激光测距雷达是通过对被测物体发射激光光束,并接收该激光光束的反射波,记录该时间差,来确定被测物体与测试点的距离
B、激光雷达测速的方法主要有两大类,一类是基于激光雷达测距原理实现,即以一定时间间隔连续测量目标距离,用两次目标距离的差值除以时间间隔就可得知目标的速度值,速度的方向根据距离差值的正负就可以确定。这种方法系统结构简单,测量精度有限,只能用于反射激光较强的硬目标。
C、激光成像雷达可用于探测和跟踪目标、获得目标方位及速度信息等。它能够完成普通雷达所不能完成的任务,如探测潜艇、水雷、隐藏的军事目标等等。在军事、航空航天、工业和医学领域被广泛应用。
D、激光雷达的缺点是无法进行大气探测,因为大气中的分子、烟雾的密度、温度、风速、风向及大气中水蒸气的浓度对激光不敏感,所以无法作为大气环境进行监测及对暴风雨、沙尘暴等灾害性天气进行预报的目的用途
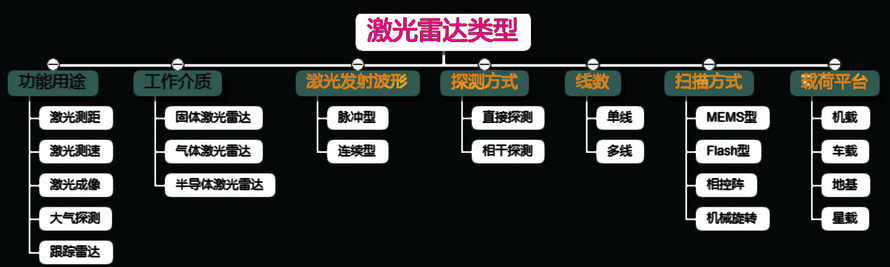
激光雷达是集激光、全球定位系统(GPS)、和IMU(惯性测量装置)三种技术于一身的系统,相比普通雷达,激光雷达具有分辨率高,隐蔽性好、抗干扰能力更强等优势:参考下图,选择正确答案;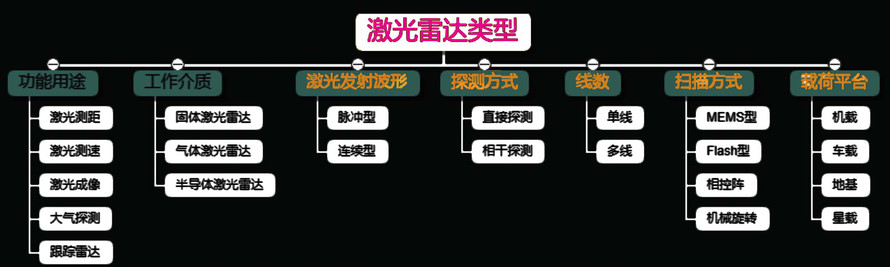
A、激光测距雷达是通过对被测物体发射激光光束,并接收该激光光束的反射波,记录该时间差,来确定被测物体与测试点的距离
B、激光雷达测速的方法主要有两大类,一类是基于激光雷达测距原理实现,即以一定时间间隔连续测量目标距离,用两次目标距离的差值除以时间间隔就可得知目标的速度值,速度的方向根据距离差值的正负就可以确定。这种方法系统结构简单,测量精度有限,只能用于反射激光较强的硬目标。
C、激光成像雷达可用于探测和跟踪目标、获得目标方位及速度信息等。它能够完成普通雷达所不能完成的任务,如探测潜艇、水雷、隐藏的军事目标等等。在军事、航空航天、工业和医学领域被广泛应用。
D、激光雷达的缺点是无法进行大气探测,因为大气中的分子、烟雾的密度、温度、风速、风向及大气中水蒸气的浓度对激光不敏感,所以无法作为大气环境进行监测及对暴风雨、沙尘暴等灾害性天气进行预报的目的用途
有一体视测距机,基线b=3m,视觉放大率Γ=50×,其角理论误差△θ为多少?如果被测目标距离为5000m和10000m,测距误差分别为多少?




为了保护您的账号安全,请在“简答题”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 简答题
微信搜一搜
简答题
简答题
微信搜一搜
简答题

 如搜索结果不匹配,请
如搜索结果不匹配,请 




 得出
得出










