 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
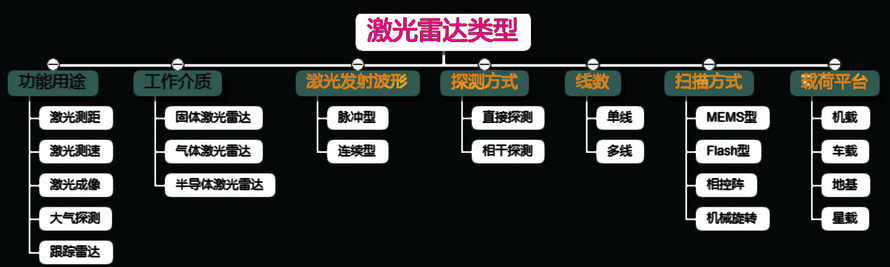
激光雷达,按照激光发射波形或数据处理方式,可分为脉冲激光雷达、连续波激光雷达、()。
A.脉冲压缩激光雷达
B.脉冲多普勒激光雷达
C.动目标显示激光雷达
D.成像激光雷达
提问人:网友houlei2325
发布时间:2022-01-06
题目内容
(请给出正确答案)
A.脉冲压缩激光雷达
B.脉冲多普勒激光雷达
C.动目标显示激光雷达
D.成像激光雷达
 更多“激光雷达,按照激光发射波形或数据处理方式,可分为脉冲激光雷达…”相关的问题
更多“激光雷达,按照激光发射波形或数据处理方式,可分为脉冲激光雷达…”相关的问题
A、摆动扫描镜
B、旋转正多面体扫描仪
C、光纤扫描仪
D、隔行扫描仪
A、Flash型激光雷达 Flash型激光雷达能快速记录整个场景,避免了扫描过程中目标或激光雷达移动带来的各种麻烦,它运行起来比较像摄像头。激光束会直接向各个方向漫射,因此只要一次快闪就能照亮整个场景。随后,系统会利用微型传感器阵列采集不同方向反射回来的激光束。Flash LiDAR有它的优势,当然也存在一定的缺陷。当像素越大,需要处理的信号就会越多,如果将海量像素塞进光电探测器,必然会带来各种干扰,其结果就是精度的下降。
B、机械旋转式激光雷达 机械旋转式激光雷达是发展比较早的激光雷达,目前技术比较成熟,但机械旋转式激光雷达系统结构十分复杂,且各核心组件价格也都颇为昂贵,其中主要包括激光器、扫描器、光学组件、光电探测器、接收IC以及位置和导航器件等。由于硬件成本高,导致量产困难,且稳定性也有待提升,目前固态激光雷达成为很多公司的发展方向。
C、相控阵激光雷达 相控阵激光雷达搭载的一排发射器可以通过调整信号的相对相位来改变激光束的发射方向。目前大多数相控阵激光雷达还在实验室里呆着,而现在仍停留在旋转式或 MEMS 激光雷达的时代,
D、间接探测激光雷达 间接探测型激光雷达的基本结构与激光测距机颇为相近。工作时,由发射系统发送一个信号,经目标反射后被接收系统收集,通过测量激光信号往返传播的时间而确定目标的距离。至于目标的径向速度,则可以由反射光的多普勒频移来确定,也可以测量两个或多个距离,并计算其变化率而求得速度。
激光雷达是集激光、全球定位系统(GPS)、和IMU(惯性测量装置)三种技术于一身的系统,相比普通雷达,激光雷达具有分辨率高,隐蔽性好、抗干扰能力更强等优势:参考下图,选择正确答案;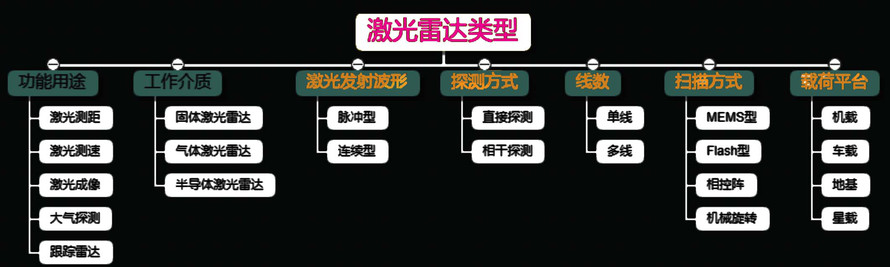
A、Flash型激光雷达 Flash型激光雷达能快速记录整个场景,避免了扫描过程中目标或激光雷达移动带来的各种麻烦,它运行起来比较像摄像头。激光束会直接向各个方向漫射,因此只要一次快闪就能照亮整个场景。随后,系统会利用微型传感器阵列采集不同方向反射回来的激光束。Flash LiDAR有它的优势,当然也存在一定的缺陷。当像素越大,需要处理的信号就会越多,如果将海量像素塞进光电探测器,必然会带来各种干扰,其结果就是精度的下降。
B、机械旋转式激光雷达 机械旋转式激光雷达是发展比较早的激光雷达,目前技术比较成熟,但机械旋转式激光雷达系统结构十分复杂,且各核心组件价格也都颇为昂贵,其中主要包括激光器、扫描器、光学组件、光电探测器、接收IC以及位置和导航器件等。由于硬件成本高,导致量产困难,且稳定性也有待提升,目前固态激光雷达成为很多公司的发展方向。
C、相控阵激光雷达 相控阵激光雷达搭载的一排发射器可以通过调整信号的相对相位来改变激光束的发射方向。目前大多数相控阵激光雷达还在实验室里呆着,而现在仍停留在旋转式或 MEMS 激光雷达的时代,
D、直接探测激光雷达 直接探测型激光雷达的基本结构与激光测距机颇为相近。工作时,由发射系统发送一个信号,经目标反射后被接收系统收集,通过测量激光信号往返传播的时间而确定目标的距离。至于目标的径向速度,则可以由反射光的多普勒频移来确定,也可以测量两个或多个距离,并计算其变化率而求得速度。
A、激光测距雷达是通过对被测物体发射激光光束,并接收该激光光束的反射波,记录该时间差,来确定被测物体与测试点的距离
B、激光雷达测速的方法主要有两大类,一类是基于激光雷达测距原理实现,即以一定时间间隔连续测量目标距离,用两次目标距离的差值除以时间间隔就可得知目标的速度值,速度的方向根据距离差值的正负就可以确定。这种方法系统结构简单,测量精度有限,只能用于反射激光较强的硬目标。
C、激光成像雷达可用于探测和跟踪目标、获得目标方位及速度信息等。它能够完成普通雷达所不能完成的任务,如探测潜艇、水雷、隐藏的军事目标等等。在军事、航空航天、工业和医学领域被广泛应用。
D、激光雷达的缺点是无法进行大气探测,因为大气中的分子、烟雾的密度、温度、风速、风向及大气中水蒸气的浓度对激光不敏感,所以无法作为大气环境进行监测及对暴风雨、沙尘暴等灾害性天气进行预报的目的用途
激光雷达是集激光、全球定位系统(GPS)、和IMU(惯性测量装置)三种技术于一身的系统,相比普通雷达,激光雷达具有分辨率高,隐蔽性好、抗干扰能力更强等优势:参考下图,选择正确答案;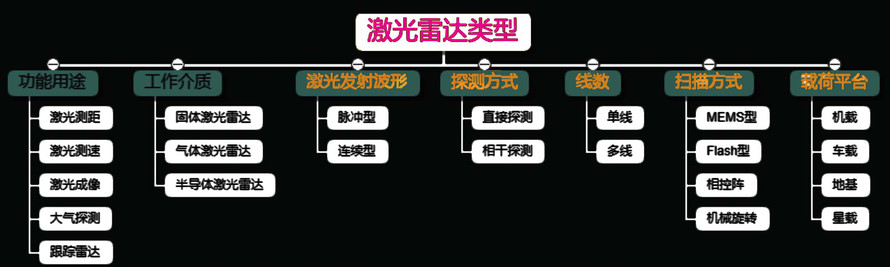
A、激光测距雷达是通过对被测物体发射激光光束,并接收该激光光束的反射波,记录该时间差,来确定被测物体与测试点的距离
B、激光雷达测速的方法主要有两大类,一类是基于激光雷达测距原理实现,即以一定时间间隔连续测量目标距离,用两次目标距离的差值除以时间间隔就可得知目标的速度值,速度的方向根据距离差值的正负就可以确定。这种方法系统结构简单,测量精度有限,只能用于反射激光较强的硬目标。
C、激光成像雷达可用于探测和跟踪目标、获得目标方位及速度信息等。它能够完成普通雷达所不能完成的任务,如探测潜艇、水雷、隐藏的军事目标等等。在军事、航空航天、工业和医学领域被广泛应用。
D、激光雷达的缺点是无法进行大气探测,因为大气中的分子、烟雾的密度、温度、风速、风向及大气中水蒸气的浓度对激光不敏感,所以无法作为大气环境进行监测及对暴风雨、沙尘暴等灾害性天气进行预报的目的用途




为了保护您的账号安全,请在“简答题”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 简答题
微信搜一搜
简答题
简答题
微信搜一搜
简答题

 如搜索结果不匹配,请
如搜索结果不匹配,请 














