题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
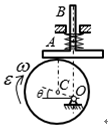
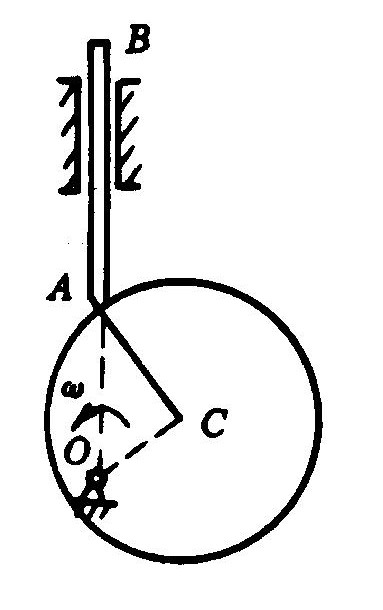
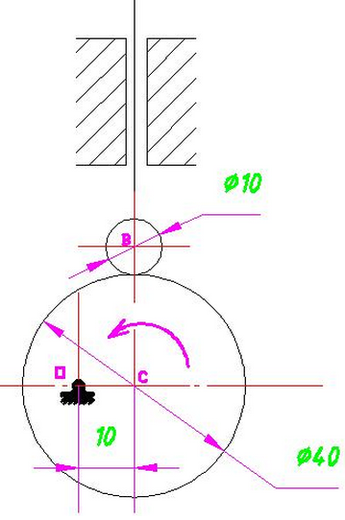
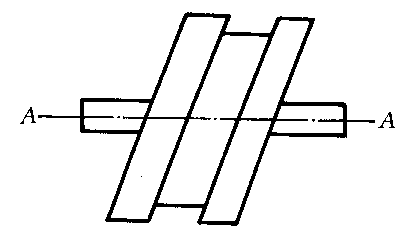
在图示机构中已知凸轮以ω1的角速度顺时针方向转动,试判断下列用瞬心法求出从动件3的速度分析步骤及方法是错误的。()
在图示机构中已知凸轮以ω1的角速度顺时针方向转动,试判断下列用瞬心法求出从动件3的速度分析步骤及方法是错误的。() 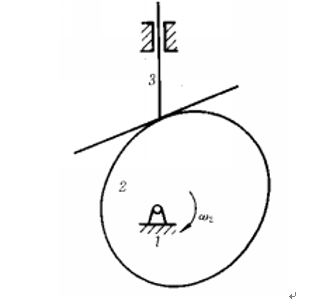
A、该机构共有3个瞬心:P12、P13和P23
B、瞬心P12位于凸轮1的转动轴心处,瞬心P13位于垂直于从动件3导路的无穷远处,而瞬心P23位于过P12点的水平线和过凸轮高副接触点公法线的交点处
C、由瞬心P23概念可得,从动件3的速度大小v3 = vP23 =ω1 μl m/s
D、从动件3的速度v3的方向为沿其导路向上
提问人:网友awei007
发布时间:2022-01-07

 如搜索结果不匹配,请
如搜索结果不匹配,请 


 的角速度顺时针方向转动,试判断下列哪个选项用瞬心法求出从动件3的速度分析步骤及方法是错误的?
的角速度顺时针方向转动,试判断下列哪个选项用瞬心法求出从动件3的速度分析步骤及方法是错误的?
 位于凸轮1的转动轴心处,瞬心
位于凸轮1的转动轴心处,瞬心 位于垂直于从动件3导路的无穷远处,而瞬心
位于垂直于从动件3导路的无穷远处,而瞬心 位于过点
位于过点 的方向为沿其导路向上方向
的方向为沿其导路向上方向
 )
) )
) ,合惯性力矩
,合惯性力矩 )
) ,合惯性力矩
,合惯性力矩 )
)