 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
【其它】请建立一个搬运类工具的TOOLDATA,以搬运薄板的真空吸盘夹具为例,重量是10kg,重心在默认tool0的Z正方向偏移150mm,TCP点设定在吸盘的接触面上,从默认tool0上的Z正方向偏移了200mm。
【其它】请建立一个搬运类工具的TOOLDATA,以搬运薄板的真空吸盘夹具为例,重量是10kg,重心在默认tool0的Z正方向偏移150mm,TCP点设定在吸盘的接触面上,从默认tool0上的Z正方向偏移了200mm。 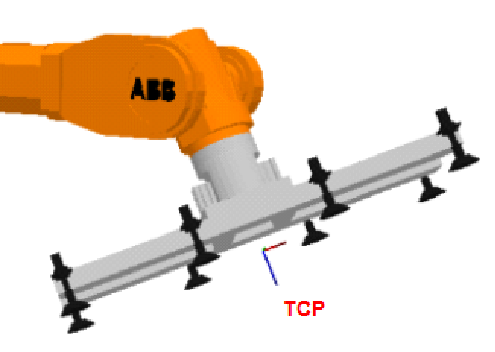
【其它】请建立一个搬运类工具的TOOLDATA,以搬运薄板的真空吸盘夹具为例,重量是10kg,重心在默认tool0的Z正方向偏移150mm,TCP点设定在吸盘的接触面上,从默认tool0上的Z正方向偏移了200mm。
提问人:网友yiqingyj
发布时间:2022-01-07

 如搜索结果不匹配,请
如搜索结果不匹配,请 


















