 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
下列关于比例积分微分PID控制
下列关于比例积分微分PID控制 的说法错误的是()。
的说法错误的是()。
A.PID控制器不能提高系统的稳态性能
B.PID作用除了增加一个位于坐标原点的开环极点之外,还提供两个负实零点
C.PID控制在提高系统动态性能方面具有更大的优势
D.PID控制器广泛应用于工业控制系统中
提问人:网友uranushq
发布时间:2022-01-07
题目内容
(请给出正确答案)
的说法错误的是()。A.PID控制器不能提高系统的稳态性能
B.PID作用除了增加一个位于坐标原点的开环极点之外,还提供两个负实零点
C.PID控制在提高系统动态性能方面具有更大的优势
D.PID控制器广泛应用于工业控制系统中
 更多“下列关于比例积分微分PID控制[图]的说法错误的是()。A.…”相关的问题
更多“下列关于比例积分微分PID控制[图]的说法错误的是()。A.…”相关的问题
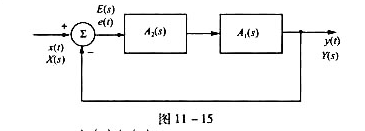
(1)若 a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值
a为正实系数.选A2(s)=K(比例控制,K为实系数).求为使系统稳定K值应满足何种条件.分别求r(t)为单位冲激或单位阶跃时,误差信号e(t)的终值 .(借助拉氏变换的终值定理.)
.(借助拉氏变换的终值定理.)
(2)若A1(s)仍如(1)问,而A2(s)改为比例积分(PI)控制 .为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
.为使系统稳定,求实系数K1、K2的范围.求x(t)为单位阶跃时误差信号e(t)的终值.比较以上二种情况下系统的跟踪性能.
(3)若 试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时
试讨论若A2(s)为PI控制时系统不稳定,而改用比例-积分-微分(PID)控制时 可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
可使系统稳定.并讨论系统对阶跃信号作用的跟踪性能,求e(t)的终值.
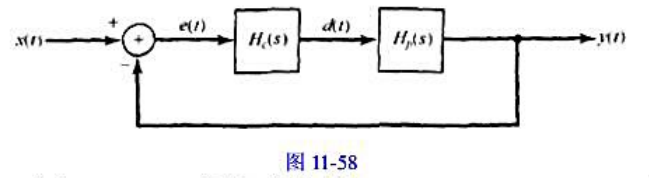
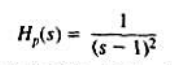
(a)假设 。
。
证明:若Hc(s)=K,称为比例(proportional)控制或P控制,就能够选择K值,以稳定该系统,并使得在x(t)=δ(t)时,有e(t)→0。证明:若x(t)=u(t),就不能得到e(t)→0。
(b)再次设Hp(s)为式(P11.57-1),并设想采用比例加(proportional-plus-integral,PI)控制,即

证明:用一个比例加积分控制器不能稳定这个系统。但是,如果采用比例加积分加微分(proportional-plus-integral-plus-differential,PID)控制,即
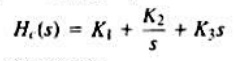
就能稳定这个系统,并让它能跟踪一个阶跃的变化。
A. 全部设备尺寸、型号及高程等数值
B. 全部仪表(包括控制、测量及计算机联结)
C. 所有管道、阀门(低高点放空除外)、安全阀、大小头及部分法兰
D. 公用工程设施、取样点、吹扫接头




为了保护您的账号安全,请在“简答题”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 简答题
微信搜一搜
简答题
简答题
微信搜一搜
简答题

 如搜索结果不匹配,请
如搜索结果不匹配,请 














