 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
如果给定机器人的手爪位置r,求能够到达这个预定位置的机器人关节变量θ的运动学问题称为正运动学。()
提问人:网友mmcz10
发布时间:2022-01-07
题目内容
(请给出正确答案)
 更多“如果给定机器人的手爪位置r,求能够到达这个预定位置的机器人关…”相关的问题
更多“如果给定机器人的手爪位置r,求能够到达这个预定位置的机器人关…”相关的问题
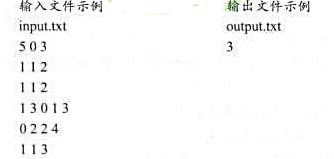
算法设计:对于给定的树T,以及障碍物在树T中的分布情况,计算机器人从起点s到终点t的最少移动次数.
数据输入:由文件input.txt提供输入数据.文件的第1行有3个正整数n,s和t,分别表示树T的顶点数,起点s的编号和终点t的编号.
接下来的n行分别对应于树T中编号为0,1,...,n-1的项点.每行的第1个整数h表示顶点的初始状态,当h+1时表示该顶点为空顶点,当h=0时表示该顶点为满顶点,其中已有一个障碍物.第2个数k表示有k个顶点与该项点相连.接下来的k个数是与该顶点相连的顶点编号.
结果输出:将计算出的机器人最少移动次数输出到文件output.txt.如果无法将机器人从起点s移动到终点t,则输出“NoSolution!"




为了保护您的账号安全,请在“简答题”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 简答题
微信搜一搜
简答题
简答题
微信搜一搜
简答题

 如搜索结果不匹配,请
如搜索结果不匹配,请 










