题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
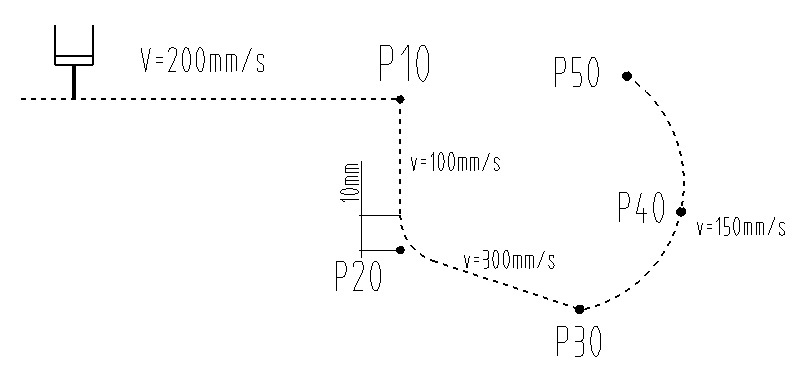
下图中机器人从目前的位置开始运动,按照给定的运动轨迹以及运动速度编写符合要求的运动程序,给定工具坐标是tool1,工件坐标是Wobj1。
下图中机器人从目前的位置开始运动,按照给定的运动轨迹以及运动速度编写符合要求的运动程序,给定工具坐标是tool1,工件坐标是Wobj1。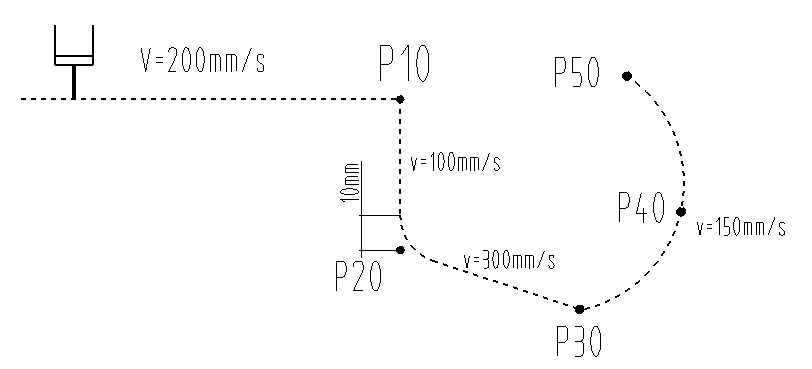
提问人:网友aazyzyaa
发布时间:2022-01-07
题目内容
(请给出正确答案)
 更多“下图中机器人从目前的位置开始运动,按照给定的运动轨迹以及运动…”相关的问题
更多“下图中机器人从目前的位置开始运动,按照给定的运动轨迹以及运动…”相关的问题
算法设计:对于给定的树T,以及障碍物在树T中的分布情况,计算机器人从起点s到终点t的最少移动次数.
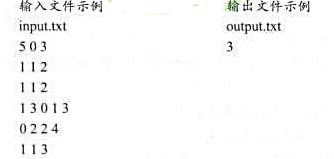
数据输入:由文件input.txt提供输入数据.文件的第1行有3个正整数n,s和t,分别表示树T的顶点数,起点s的编号和终点t的编号.
接下来的n行分别对应于树T中编号为0,1,...,n-1的项点.每行的第1个整数h表示顶点的初始状态,当h+1时表示该顶点为空顶点,当h=0时表示该顶点为满顶点,其中已有一个障碍物.第2个数k表示有k个顶点与该项点相连.接下来的k个数是与该顶点相连的顶点编号.
结果输出:将计算出的机器人最少移动次数输出到文件output.txt.如果无法将机器人从起点s移动到终点t,则输出“NoSolution!"
B.工业机器人由三大部分六个子系统组成。三大部分是机械部分、传感部分和控制部分。六个子系统是驱动系统、机械结构系统、感受系统、机器人-环境交互系统、人机交互系统和控制系统。
C.机器人控制系统是机器人的大脑,是决定机器人功能和性能的主要因素。工业机器人技术工业机器人控制技术的主要任务就是控制工业机器人在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等。具有编程简单、软件菜单操作、友好的人机交互界面、在线操作提示和使用方便等特点。
D.机械 主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。工业机器人有6个自由度甚至更多其中腕部通常有1~3个运动自由度




为了保护您的账号安全,请在“简答题”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 简答题
微信搜一搜
简答题
简答题
微信搜一搜
简答题

 如搜索结果不匹配,请
如搜索结果不匹配,请