 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[多选题]
机械臂的使用,以下描述正确的是()
A.压机运行后,机械臂则自动与机台联接,进入生产
B.机械臂的使用,需要在压机设置中,打开联接开关,才能使得压机与机械臂一起联动
C.目前机械臂能达成的功能为:压制取料→单面扫毛刺→称重→装盘
D.从机械臂中拿取产品进行检测时,必须对机械臂进行停机,防止夹伤
提问人:网友90000002
发布时间:2023-08-27
题目内容
(请给出正确答案)
A.压机运行后,机械臂则自动与机台联接,进入生产
B.机械臂的使用,需要在压机设置中,打开联接开关,才能使得压机与机械臂一起联动
C.目前机械臂能达成的功能为:压制取料→单面扫毛刺→称重→装盘
D.从机械臂中拿取产品进行检测时,必须对机械臂进行停机,防止夹伤
 更多“机械臂的使用,以下描述正确的是()”相关的问题
更多“机械臂的使用,以下描述正确的是()”相关的问题
A.TCP是可变的,可以人为设置其位置
B.通常讲的让机械臂进行直线运动实际是让机械臂控制TCP以直线方式运动
C.如果不人为设置,TCP默认设在法兰盘中央
D.TCP是机械臂夹爪上实际存在的一个物理点
起重机防止超载的保护装置主要有起重量限制器和力矩限制器,以下有关说法不正确的是()。
A.流动式起重机一般使用力矩限制器进行超载保护
B.动臂变幅的塔式起重机一般使用机械型力矩限制器
C.起重量限制器主要用于塔式起重机
D.小车变幅式起重机一般使用起重量限制器和起重力矩限制器来共同实施超载保护
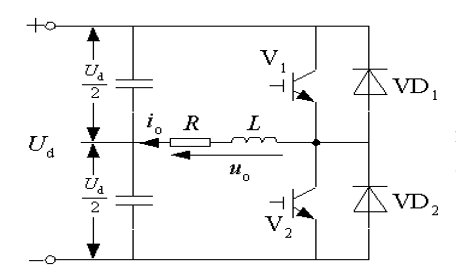
A.输出交流电压uo的幅值为Ud
B.电路结构复杂,使用器件较多
C.需要控制直流侧两个电容器电压的均衡
D.逆变桥桥臂可以不用并联反馈二极管
A.起重量限制器主要用于塔式起重机
B.动臂变幅的塔式起重机一般使用机械型力矩限制器
C.流动式起重机一般使用力矩限制器进行超载保护
D.小车变幅式起重机一般使用起重量限制器和起重力矩限制器来共同实施超载保护
A.安捷伦LCMSHPLC按照walkup软件提示在正确的时间内放置到指定位置
B.岛津LCMS按照批表的位置依次放置样品瓶,机械臂移动过程中不能放置样品瓶
C.如果指定位置已有样品瓶的话需联系分析同事处理
D.安捷伦LCMS正在进样过程中就放置样品瓶
A.传感器消息发布一般都采用Topic形式发布
B.机械臂关节逆解适合用Service通信
C.现在要设计一个节点,开发路径规划功能,输入是目标点和起始点,输出是路径,适合用Topic通信方式
D.Action更适合用在执行时间长、并且需要知道状态和结果的场景
下列力矩限制器中,一般使用机械型力矩限制器的是()。
A.动臂变幅的塔式起重机
B.小车变幅式起重机
C.流动式起重机
D.固定式起重机
A.输出交流电压的幅值Um为Ud/2
B.电路结构简单,使用器件少
C.需要控制直流侧两个电容器电压的均衡
D.逆变桥桥臂可以不用并联反馈二极管




为了保护您的账号安全,请在“简答题”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 简答题
微信搜一搜
简答题
简答题
微信搜一搜
简答题

 如搜索结果不匹配,请
如搜索结果不匹配,请 













