 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
()是用来确定根轨迹上某点的相应增益值。
A.辐角条件
B. 幅值条件
C. 开环增益
D. 开环零点
提问人:网友XMHAIBO
发布时间:2022-01-06
题目内容
(请给出正确答案)
A.辐角条件
B. 幅值条件
C. 开环增益
D. 开环零点
 更多“()是用来确定根轨迹上某点的相应增益值。”相关的问题
更多“()是用来确定根轨迹上某点的相应增益值。”相关的问题
设单位反馈控制系统的开环传递函数为 根轨迹图如题图所示。
根轨迹图如题图所示。
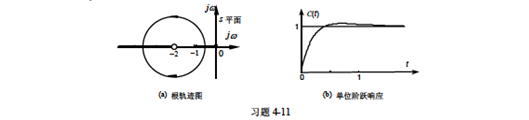
(1)当系统的阻尼振荡频率 时,试确定闭环主导极点的值与相应的增益值。
时,试确定闭环主导极点的值与相应的增益值。
(2)当系统的阻尼参数ζ=1时,其单位阶跃响应如题图所示,试分析超调量产生的原因。
有一个离散时间反馈系统,其
(a)分别画出K>0和K<0时的根轨迹。
(b)如果已经正确地画出了K>0时的根轨迹,将会发现,根轨迹的两条支路跨过单位圆,并从单位圆上出去,结果可以得出,在 范围内,闭环系统是稳定的,这里K0是两条支路与单位圆相交的增益值。这些支路从单位圆上的什么点上出去?K0值为多少?
范围内,闭环系统是稳定的,这里K0是两条支路与单位圆相交的增益值。这些支路从单位圆上的什么点上出去?K0值为多少?
 来完成。具体而言,画出K>0时的根轨迹,并标出使阻尼能得到明显改善的增益值K。
来完成。具体而言,画出K>0时的根轨迹,并标出使阻尼能得到明显改善的增益值K。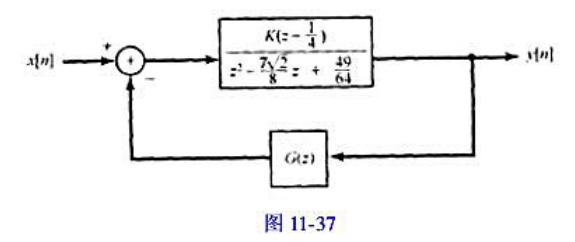
考虑一个连续时间反馈系统,其

(a)分别画出K>0和K<0的根轨迹。
(b)如果已经正确地画出了这条根轨迹,将会发现,对于K>0,这条根轨迹的两条支路跨过jω轴,由左半平面进入右半平面,结果可以得出该闭环系统在 是稳定的,其中K0是根轨迹的两条支路与jω轴相交时的增益值。应该注意,作根轨迹时本身并没有告诉K0值时多少,或者两条支路跨过jω轴是在哪一点。根据习题11.35.利用解方程
是稳定的,其中K0是根轨迹的两条支路与jω轴相交时的增益值。应该注意,作根轨迹时本身并没有告诉K0值时多少,或者两条支路跨过jω轴是在哪一点。根据习题11.35.利用解方程

得到的一对实部和虚部方程求出K0值和相应的两个ω值,因为极点成复数共轭,所以它们互为负值。根据在(a)中所得到的根轨迹图,可以看到,在实轴上位于两个极点之间的一段位于K>0时的根轨迹图上,而在实轴上有另外一段位于K<0时的根轨迹图上。在两种情况下,根轨迹都在实轴上的某一点分裂开。本题的下一部分说明如何计算出这些分裂点。
(c)将闭环极点方程记为

利用式(P11.36-1)证明:闭环极点的等效方程是

考虑实轴上位于0和-1之间的一段,这一段位于K≥0时的根轨迹上。对于K=0,根轨迹的两条支路从0和-1开始,随着K增大而互相靠近。
(i)利用上面陈述的理由,并结合式(P11.36-4),解释为什么函数P(s)在-1≤s≤0时具有图11-31(a)所示的形状,以及为什么发生最小值的点s+是分离点(即是K>0时根轨迹的两条支路在-1和0之间的实轴段分离的点)。
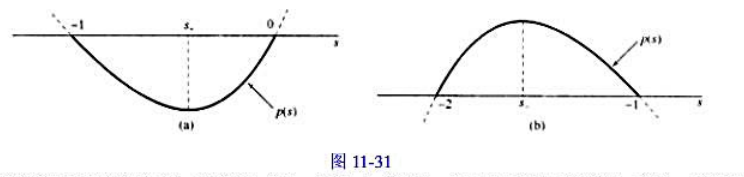
同理考虑K<0时的根轨迹,在实轴上位于-1和-2之间的一段是K<0时根轨迹的一部分。对于K=0,根轨迹的两条支路开始于-1和-2,随着K的减小,这些极点互相靠近。
(ii)利用(i)所用的类似方法,解释为什么函数p(s)具有图11-31(b)所示的形状,以及为什么发生最大值的点s.是K<0时的分离点。
因此,当S在负实轴上一段范围内变化时,分离点就相应于p(s)的最大值和最小值。
(iii)p(s)具有最大值或最小值的点是方程 的解。利用这一点,求出分离点s+和s.,然后利用式(P11.36-4)求出使这些点成为闭环极点的增益。
的解。利用这一点,求出分离点s+和s.,然后利用式(P11.36-4)求出使这些点成为闭环极点的增益。
A、根轨迹上的分离点坐标值一定是闭环特征根的重根值
B、实轴上的分离点所对应的根轨迹增益值,一定是系统单调与振荡模态的根轨迹增益分界值
C、实轴上的分离点所对应的根轨迹增益值,不一定是系统单调与振荡模态的根轨迹增益分界值,具体还要看此时其他极点是否均是纯实数极
D、我们在画180度根轨迹图时,通过公式求出的某些分离点坐标值有些时候要舍去,其原因是这些解既包含了180度根轨迹分离点坐标也包含了零度根轨迹的分离点坐标




为了保护您的账号安全,请在“简答题”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 简答题
微信搜一搜
简答题
简答题
微信搜一搜
简答题

 如搜索结果不匹配,请
如搜索结果不匹配,请 














