 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
简单控制系统控制参数选择时,选择结果应使控制通道的静态增益尽可能小。()
简单控制系统控制参数选择时,选择结果应使控制通道的静态增益尽可能小。()
提问人:网友xiayan188
发布时间:2022-01-06
题目内容
(请给出正确答案)
简单控制系统控制参数选择时,选择结果应使控制通道的静态增益尽可能小。()
 更多“简单控制系统控制参数选择时,选择结果应使控制通道的静态增益尽…”相关的问题
更多“简单控制系统控制参数选择时,选择结果应使控制通道的静态增益尽…”相关的问题
A.选择可控性良好的参数作为控制参数;
B.必须使控制通道有足够大的放大系数,并保证其大于主要扰动通道的放大系数,以实现对主要扰动的有效抑制,进而提高控制质量;
C.必须使控制通道具有较高的灵敏度,即控制通道的时间常数适当小一些;
D.应同时考虑经济性和工艺上的 合理性需求。
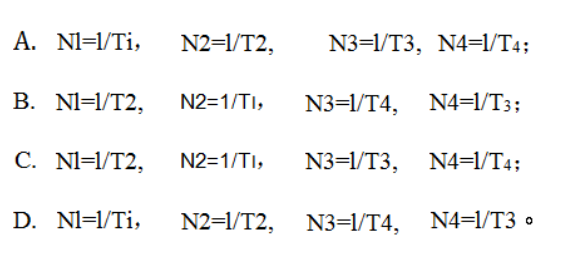
Q/GDW11891-2018《同步发电机励磁系统控制参数整定计算导则》,根据励磁系统主控制环串联PID模型图,选择串联PID控制幅频特性图中对应频率值()。
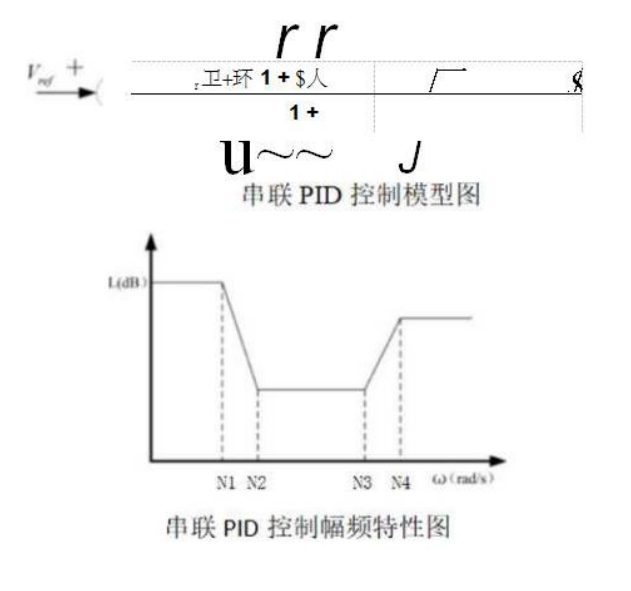
A.A
B.B
C.C
D.D
A.PLC控制系统控制被控对象应最大限度地满足工艺要求
B.在满足工艺要求的前提下,力求使PLC控制系统简单、经济、使用及维修方便
C.保证控制系统的安全、可靠
D.考虑到生产的发展和工艺的改进,在配置PLC硬件设备时应适当留有一定的裕量
A.控制器只能实现PID控制算法。
B.控制器进行手/自动切换时,为保证无扰动切换,应先调整PID参数。
C.控制器在任何时刻都应设置为自动状态。
D.控制器正反作用的选择应使系统构成负反馈。
A.进行定量计算时选择的计算方法
B.进行峰定性时选择的允许时间偏差计算方式
C.接受并计算分析结果的终止时间
D.进行峰定性时所允许的时间偏差大小
A.并联PID控制参数应根据同步发电机空载电压阶跃响应试验结果进行整定;
B.空载电压阶跃量:在阶跃扰动不进入非线性调节区域的原则下,静止励磁系统一般取5阶跃,励磁机励磁系统一般取2%阶跃;
C.静止励磁系统空载电压阶跃响应应满足:上升时间不大于0.5s,振荡次数不超过3次,调节时间不超过5s,超调量不大于30%;
D.励磁机励磁系统空载电压阶跃响应应满足:上升时间不大于0.6s,振荡次数不超过3次,调节时间不超过10s,超调量不大于40%。
E.并联PID控制函数转换成串联PID控制函数时,转换后的串联PID控制函数等效参数应是实数。
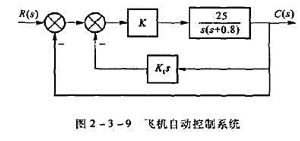
图2-3-9是飞机自动控制系统的简单结构图。试选择参数K和K1,使系统的ωm=6 rad·s-1,ζ=1,并讨论系统在单位阶跃作用下的各项性能指标。




为了保护您的账号安全,请在“简答题”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 简答题
微信搜一搜
简答题
简答题
微信搜一搜
简答题

 如搜索结果不匹配,请
如搜索结果不匹配,请 










