题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
某反馈控制系统已校正成典型Ⅰ型系统。已知时间常数T=0.1s,要求阶跃响应超调量≤10%。(1)系统的开
某反馈控制系统已校正成典型Ⅰ型系统。已知时间常数T=0.1s,要求阶跃响应超调量 ≤10%。
≤10%。
(1)系统的开环增益。
(2)计算过渡过程时间ts和上升时间tr;
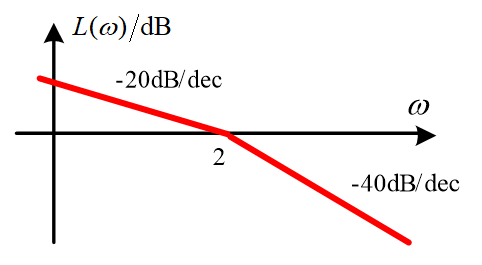
(3)绘出开环对数幅频特性。如果要求上升时间tr<0.25s,则K=?, %=?
%=?
提问人:网友yr1161772517
发布时间:2022-06-13
题目内容
(请给出正确答案)
某反馈控制系统已校正成典型Ⅰ型系统。已知时间常数T=0.1s,要求阶跃响应超调量≤10%。
(1)系统的开环增益。
(2)计算过渡过程时间ts和上升时间tr;
(3)绘出开环对数幅频特性。如果要求上升时间tr<0.25s,则K=?,%=?
 更多“某反馈控制系统已校正成典型Ⅰ型系统。已知时间常数T=0.1s…”相关的问题
更多“某反馈控制系统已校正成典型Ⅰ型系统。已知时间常数T=0.1s…”相关的问题
要求设计一个串联超前一滞后校正网络,使系统在单位斜坡输入时的稳态误差不大于0.0125,单位阶跃响应的超调量小于25%,调节时间小于3s(Δ=2%),并要求给出系统校正前后的单位阶跃输入响应曲线。试问:选用网络

是否合适?
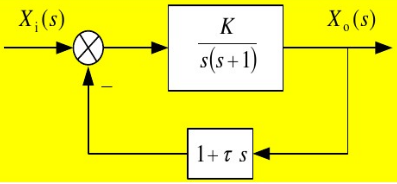
控制系统方框图如图所示。若要求系统单位阶跃响应超调量MP=20%,调整时间ts≤1.5s(△=5%),试确定K与τ的值。
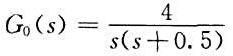
已知单位负反馈系统被控对象的传递函数为: 使用根轨迹法对系统进行超前串联校正设计,使之满足: (1)阶跃响应的超调量
使用根轨迹法对系统进行超前串联校正设计,使之满足: (1)阶跃响应的超调量 % (2)阶跃响应的调节时间不超过
% (2)阶跃响应的调节时间不超过




为了保护您的账号安全,请在“简答题”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 简答题
微信搜一搜
简答题
简答题
微信搜一搜
简答题

 如搜索结果不匹配,请
如搜索结果不匹配,请