题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
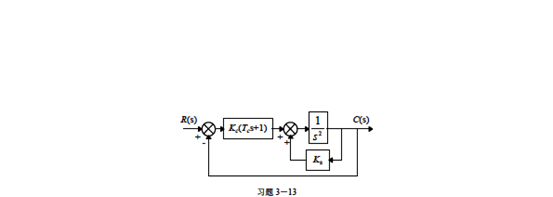
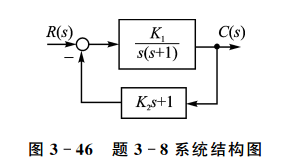
已知速度反馈控制系统如题图所示,为了保证系统阶跃响应的超调量Mp<20%,过渡时间ts≤0.3秒,试
确定前向增益K1的值和速度反馈系数K2的值。

提问人:网友lijiahangsxb
发布时间:2022-06-11
题目内容
(请给出正确答案)
 更多“已知速度反馈控制系统如题图所示,为了保证系统阶跃响应的超调量…”相关的问题
更多“已知速度反馈控制系统如题图所示,为了保证系统阶跃响应的超调量…”相关的问题
设单位反馈控制系统的开环传递函数为 根轨迹图如题图所示。
根轨迹图如题图所示。
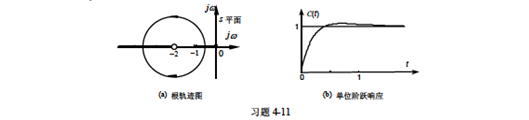
(1)当系统的阻尼振荡频率 时,试确定闭环主导极点的值与相应的增益值。
时,试确定闭环主导极点的值与相应的增益值。
(2)当系统的阻尼参数ζ=1时,其单位阶跃响应如题图所示,试分析超调量产生的原因。
已知某控制系统如题图所示,内环为正反馈,反馈系数为 是
是
不稳定的,在反馈的基础上增加前向通路比例一微分控制时,系统可以稳定。试确定
(1)系统稳定时,P=D控制器参数K,I的取值条件:
(2)当正反馈系数Ks=0.8时,要求系繞阶跃响应的超调量Mp=163%和过波时间ts=08秒,试确定P-D控制器参数Ke,Te的取值.
已知控制系统结构图如图所示。 (1)当不存在速度反馈(b=0)时,试确定单位阶跃输入时系统的阻尼系数、自然频率、最大超调量以及由单位斜坡输入所引起的稳态误差。 (2)确定系统阻尼比等于0.8时的速度反馈常数b的值,并确定在单位阶跃输入时系统的最大超调量和单位斜坡输入所引起的稳态误差。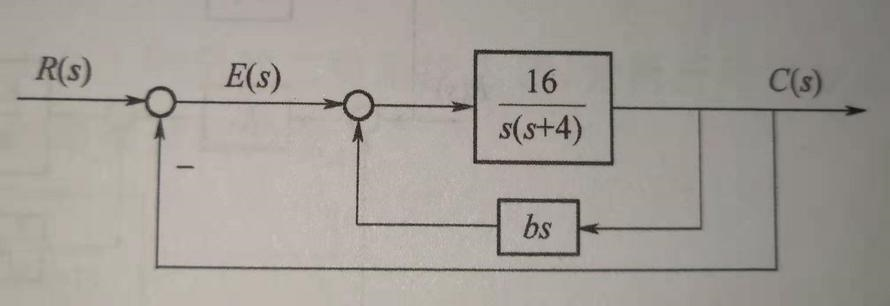




为了保护您的账号安全,请在“简答题”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 简答题
微信搜一搜
简答题
简答题
微信搜一搜
简答题

 如搜索结果不匹配,请
如搜索结果不匹配,请 

 ,使干扰
,使干扰 对系统输出无影响,且要求系统对单位阶跃响应指标为超调量
对系统输出无影响,且要求系统对单位阶跃响应指标为超调量 ,过渡时间
,过渡时间 秒(5%误差带),则确定k1,k2,
秒(5%误差带),则确定k1,k2, 为:
为:





 值,使系统阶跃响应的峰值时间
值,使系统阶跃响应的峰值时间 (s),超调量
(s),超调量 %=0.2%。
%=0.2%。