 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
图6-26 为机器人和视觉系统的示意图,移动机器人利用摄像系统来观测环境信息。已知机器人系统为
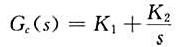
单位反馈系统,被控对象为机械臂,其传递函数

为了使系统阶跃响应的稳态误差为零,采用串联PI控制器
试设计合适的K1与K2值,使系统阶跃响应的超调量不大于5%,调节时间小于6s (Δ=2%),静态速度误差系数Ku≥0.9。
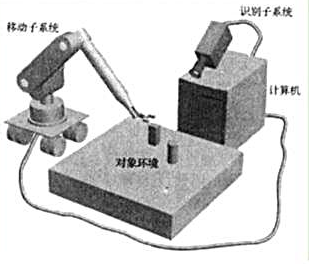
图6-26机器人和视觉系统
提问人:网友yr1161772517
发布时间:2022-01-07
题目内容
(请给出正确答案)
为了使系统阶跃响应的稳态误差为零,采用串联PI控制器
试设计合适的K1与K2值,使系统阶跃响应的超调量不大于5%,调节时间小于6s (Δ=2%),静态速度误差系数Ku≥0.9。
图6-26机器人和视觉系统
 更多“图6-26 为机器人和视觉系统的示意图,移动机器人利用摄像系…”相关的问题
更多“图6-26 为机器人和视觉系统的示意图,移动机器人利用摄像系…”相关的问题
 203¿/h,泵的效字为60%,试确定泵提供的轴功率.(cp=匣泊=10-3Pa.s,1kgf.cm-2=lat=9.8X104Pa)
203¿/h,泵的效字为60%,试确定泵提供的轴功率.(cp=匣泊=10-3Pa.s,1kgf.cm-2=lat=9.8X104Pa)

给定滤波器传递函数
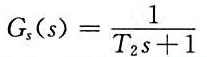
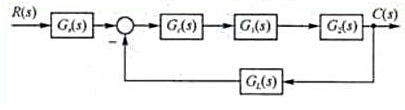
图6-9电流环结构图
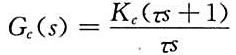
比例-积分控制器传递函数
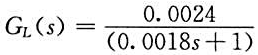
反馈环节传递函数
试按三阶最佳工程设计法确定参数Kc、τ和T2。
 与等物质的量的Br2加成时,是碳碳双键与Br2发生加成反应;而
与等物质的量的Br2加成时,是碳碳双键与Br2发生加成反应;而 与等物质的量的Br2加成,却是碳碳三键与Br2发生加成反应?
与等物质的量的Br2加成,却是碳碳三键与Br2发生加成反应?




为了保护您的账号安全,请在“简答题”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 简答题
微信搜一搜
简答题
简答题
微信搜一搜
简答题

 如搜索结果不匹配,请
如搜索结果不匹配,请 










