题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
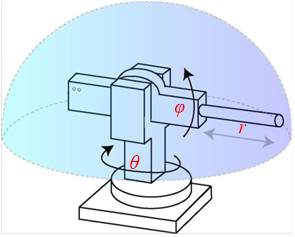
串联关节机器人的关节坐标序号是从手部末端执行器依次标到机座的。
提问人:网友mandy4913
发布时间:2022-01-07
题目内容
(请给出正确答案)
 更多“串联关节机器人的关节坐标序号是从手部末端执行器依次标到机座的…”相关的问题
更多“串联关节机器人的关节坐标序号是从手部末端执行器依次标到机座的…”相关的问题




为了保护您的账号安全,请在“简答题”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 简答题
微信搜一搜
简答题
简答题
微信搜一搜
简答题

 如搜索结果不匹配,请
如搜索结果不匹配,请