 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
在不限制关节角范围的情况下,图中的机械臂末端到达同一位置时的关节角最多可以有()种不同的解。
在不限制关节角范围的情况下,图中的机械臂末端到达同一位置时的关节角最多可以有()种不同的解。 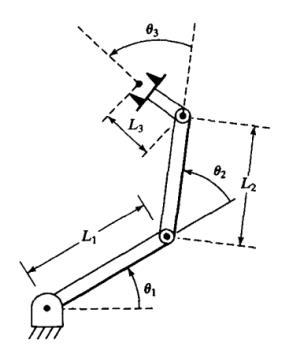
在不限制关节角范围的情况下,图中的机械臂末端到达同一位置时的关节角最多可以有()种不同的解。
提问人:网友tiger4681
发布时间:2022-01-07
题目内容
(请给出正确答案)
 更多“在不限制关节角范围的情况下,图中的机械臂末端到达同一位置时的…”相关的问题
更多“在不限制关节角范围的情况下,图中的机械臂末端到达同一位置时的…”相关的问题
A. 与构成关节的近端骨长轴平行
B. 与构成关节的远端骨长轴平行
C. 与构成关节的近端骨长轴垂直
D. 与构成关节的远端骨长轴垂直
E. 与关节的中轴线相平行
B.与构成关节的近端骨长轴平行
C.与构成关节的远端骨长轴垂直
D.与构成关节的近端骨长轴垂直
E.以上都不对
 ,杆1的长度为s),关节2为移动关节(杆2的固定初始长度为a,伸长量为b)。试推导该机械臂的雅可比矩阵,要求写出具体的推导步骤。
,杆1的长度为s),关节2为移动关节(杆2的固定初始长度为a,伸长量为b)。试推导该机械臂的雅可比矩阵,要求写出具体的推导步骤。
A. 测角器轴心放于股骨外髁
B. 测角器轴心放于股骨内髁
C. 测角器移动臂与胫骨纵轴平行
D. 测角器固定臂与胫骨纵轴垂直
E. 测角器轴心放于股骨内踝与外踝连线中点




为了保护您的账号安全,请在“简答题”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 简答题
微信搜一搜
简答题
简答题
微信搜一搜
简答题

 如搜索结果不匹配,请
如搜索结果不匹配,请 










