 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
系统对单位斜坡函数输人R(s)=1/s2的稳态误差称为()
A.位置误差
B.速度误差
C.加速度误差
D.系统误差
提问人:网友15***739
发布时间:2022-01-06
题目内容
(请给出正确答案)
A.位置误差
B.速度误差
C.加速度误差
D.系统误差
 更多“系统对单位斜坡函数输人R(s)=1/s2的稳态误差称为()A…”相关的问题
更多“系统对单位斜坡函数输人R(s)=1/s2的稳态误差称为()A…”相关的问题
A.0
B.1/K
C.-1/K
D.1/T
E.-1/T
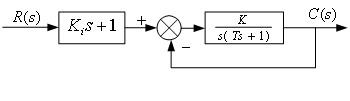
系统结构如下图所示。输入是斜坡函数r(t)=at。Ki= ,该系统对斜坡输入的稳态误差能达到零,已知E(s)=R(s)-C(s)]。
A.0
B.1/K
C.-1/K
D.1/T
E.-1/T
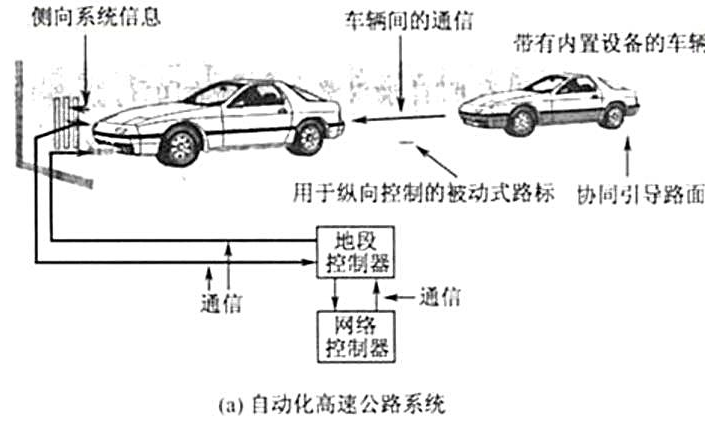
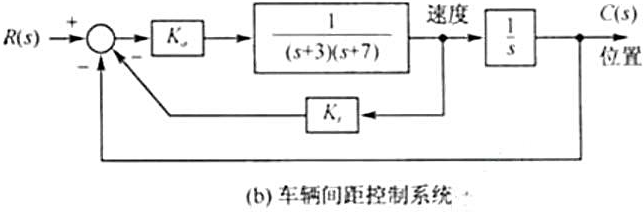
图4-45智能汽车-高速公路系统
控制系统如图。![控制系统如图。 [图] 已知连续对象特性为 [图] 试设计...控制系统如图。 已知连续对象特性为](http://static.jiandati.com/52c8dd3-chaoxing2016-506092.png) 已知连续对象特性为
已知连续对象特性为![控制系统如图。 [图] 已知连续对象特性为 [图] 试设计...控制系统如图。 已知连续对象特性为](http://static.jiandati.com/6f92d01-chaoxing2016-506093.png) 试设计数字控制器D(z),使系统在斜坡函数r(t)=0.01t输入时,稳态误差ess=0.01rad。要求数字控制系统具有接近于连续系统ξ=0.5,ωn=1的动态特性。 [提示:需先完成D(s)设计,再完成D(z)设计。手算或LabVIEW/MATLAB仿真皆可]
试设计数字控制器D(z),使系统在斜坡函数r(t)=0.01t输入时,稳态误差ess=0.01rad。要求数字控制系统具有接近于连续系统ξ=0.5,ωn=1的动态特性。 [提示:需先完成D(s)设计,再完成D(z)设计。手算或LabVIEW/MATLAB仿真皆可]
系统结构如图3-1所示,Gs=K/[s(Ts+1)],定义误差e(t)=r(t)-c(t)。
![系统结构如图3-1所示,Gs=K/[s(Ts+1)],定义误差e(t)=r(t)-c(t)。(1)](https://img2.soutiyun.com/ask/2020-06-17/961240937618633.png)
(1) 若希望图a中,系统所有的特征根位于s平面上s=-2的左侧,且阻尼比为0.5,求满足条件的K,T的取值范围。
(2)求图a系统的单位斜坡输入下的稳态误差。
(3)为了使稳态误差为零,让斜坡输入先通过一个比例微分环节,如图b所示,试求出合适的KD值。
试求下述系统在单位斜坡函数r(t)=t (t≥0)输入下的响应y(t)和误差函数e(t)。
系统结构如图3.62所示,
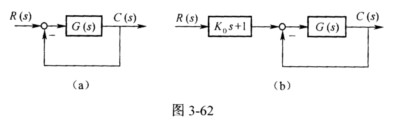 ,定义误差e(t)=r(t)-c(t)。 试求: (1)若希望图3-62(a)中系统所有的特征根位于s平面上s=-2的左侧,且阻尼比为0.5,求满足条件的K,T的取值范围。 (2)求图3-62(a)系统的单位斜坡输入下的稳态误差。 (3)为了使稳态误差为零,让斜坡输入先通过一个比例微分环节,如图3-62(b)所示,试求出合适的K0值。
,定义误差e(t)=r(t)-c(t)。 试求: (1)若希望图3-62(a)中系统所有的特征根位于s平面上s=-2的左侧,且阻尼比为0.5,求满足条件的K,T的取值范围。 (2)求图3-62(a)系统的单位斜坡输入下的稳态误差。 (3)为了使稳态误差为零,让斜坡输入先通过一个比例微分环节,如图3-62(b)所示,试求出合适的K0值。




为了保护您的账号安全,请在“简答题”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 简答题
微信搜一搜
简答题
简答题
微信搜一搜
简答题

 如搜索结果不匹配,请
如搜索结果不匹配,请 














