 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
有关擒纵机构的工作原理描述有如下选项,其中正确选项为()
A.擒纵机构的间歇运动频率是由其游丝摆轮的固有振动系统来控制的,而其能量损失是靠擒纵叉的卡瓦来补给的
B.有固有振动系统型较无固有振动系统型的擒纵机构,其间歇运动频率稳定,故常用于机械手表中
C.擒纵机构的擒纵叉有两个卡瓦,其中一个拨动擒纵轮转动,另一个起到防止擒纵轮逆转的作用
D.擒纵机构用于分度转位机构
提问人:网友ndsingz
发布时间:2022-01-07
题目内容
(请给出正确答案)
A.擒纵机构的间歇运动频率是由其游丝摆轮的固有振动系统来控制的,而其能量损失是靠擒纵叉的卡瓦来补给的
B.有固有振动系统型较无固有振动系统型的擒纵机构,其间歇运动频率稳定,故常用于机械手表中
C.擒纵机构的擒纵叉有两个卡瓦,其中一个拨动擒纵轮转动,另一个起到防止擒纵轮逆转的作用
D.擒纵机构用于分度转位机构
 更多“有关擒纵机构的工作原理描述有如下选项,其中正确选项为()”相关的问题
更多“有关擒纵机构的工作原理描述有如下选项,其中正确选项为()”相关的问题
B.明确工程施工目标、确定工程施工顺序及施工流水段,针对工程的重点和难点,进行施工安排并简述主要管理和技术措施
C.每个工程的施工顺序都应保持固定不变
D.工程的重点和难点的设置,主要是根据工程的重要程度,即质量特征值对整个工程贡量的影响程度来确定
E.专项施工方案的技术重点和难点设置应该包括设计、计算、详图、文字说明等
此题为判断题(对,错)。
A、槽数的外槽轮机构,主动拨盘圆销数最多应为4
B、槽轮运动的角速度和角加速度的最大值随槽数的减小而增大,且柔性冲击也增大;
C、内槽轮机构虽也有柔性冲击,但它的动力性能要比外槽轮机构好得多
D、主动盘单圆销、径向槽均布的外槽轮机构中,槽轮的最少槽数为4
A、用改变主动摇杆摆角或加装棘轮罩的方法可实现棘轮机构分度角大小的调节
B、棘轮每次至少转过一个轮齿,不能实现棘轮转角小于360°/z(棘轮齿数)的分度运动
C、棘轮机构的可靠工作条件是棘齿面的倾斜角α应大于摩擦角φ
D、棘轮机构能实现棘轮可换向式或双动式的单向间歇转动;
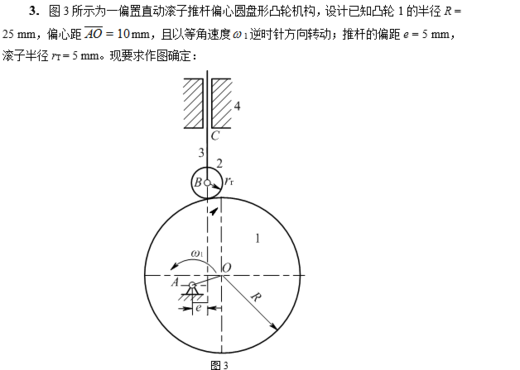
A、此推杆运动规律型式为升降型
B、推杆推程运动角δ0 =180°
C、推杆回程运动角δ'0=180°
D、推杆的行程h =20 mm
A、其作用线为B、C处两摩擦圆的左上切而右下切的内公切线
B、其作用线与BC线共线
C、其作用线为B、C处两摩擦圆的上外公切线
D、其作用线为B、C处两摩擦圆的左下切而右上切的内公切线
凸轮由图示位置逆瞬时针转过45°时推杆的位移s和凸轮机构的压力角α;
A、假定凸轮静止不动,作推杆由图示位置顺瞬时针转过45°时的位置再来进行图解
B、作推杆反转45°时的导路方向上在基圆与理论廓线之间的距离,即为推杆的位移s =13.8 mm
C、作推杆反转45°时的导路方向与其滚子凸轮中心的连线方向所夹的锐角,即为凸轮的压力角α= 10°
D、作凸轮由图示位置逆瞬时针转过45°时的位置, 再求作推杆的位移和压力角
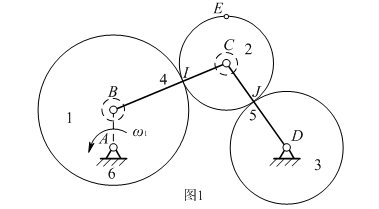
A、计算该机构的自由度F = 1;
B、因机构的原动件数等于其自由度,故其具有确定的运动
C、机构中铰链C为二副复合铰链,而无局部自由度和虚约束,即F' =0,p'=0
D、机构中的活动构件数n = 5,低副数pl = 5,高副数ph = 2
A、速度图中由极点引出的矢量代表绝度速度,而连接两矢端的矢量代表相对速度;
B、机构中构件的速度图形与其位置图形之间存在相似关系
C、整个机构的位置图与其速度图之间存在速度影像关系;
D、利用速度影像原理可求作平面复合运动构件上任一点的速度。




为了保护您的账号安全,请在“简答题”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 简答题
微信搜一搜
简答题
简答题
微信搜一搜
简答题

 如搜索结果不匹配,请
如搜索结果不匹配,请 














