 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
如图,假设每一个圆物料的高度为20mm,物料盘摆放物料的位置每个方向间隔为50mm,编写程序完成从目标码垛到物料盘的搬运。注明需要用到的输入输出点,需要示教的位置参数,路径规划,程序图。
如图,假设每一个圆物料的高度为20mm,物料盘摆放物料的位置每个方向间隔为50mm,编写程序完成从目标码垛到物料盘的搬运。注明需要用到的输入输出点,需要示教的位置参数,路径规划,程序图。 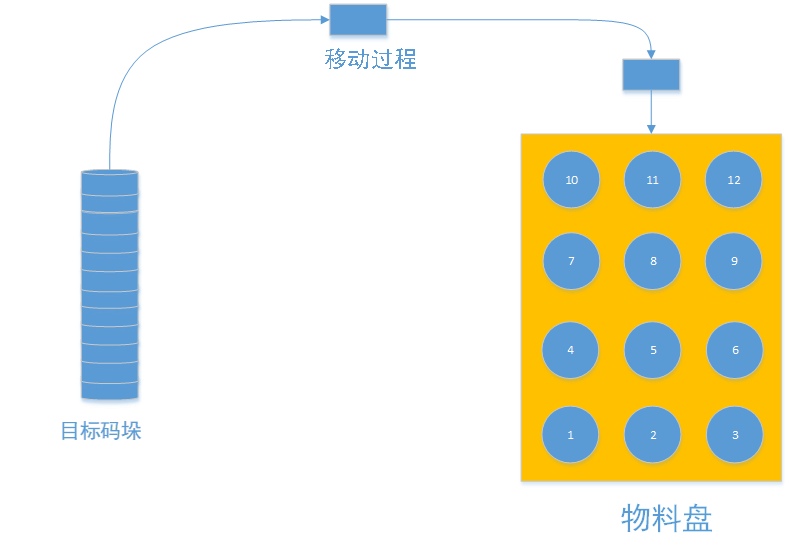
如图,假设每一个圆物料的高度为20mm,物料盘摆放物料的位置每个方向间隔为50mm,编写程序完成从目标码垛到物料盘的搬运。注明需要用到的输入输出点,需要示教的位置参数,路径规划,程序图。
提问人:网友ktfanpub
发布时间:2022-01-07

 如搜索结果不匹配,请
如搜索结果不匹配,请 


















