题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
下述系统的能控性指数为()
下述系统的能控性指数为()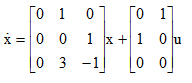
A.1
B.2
C.3
D.不存在
提问人:网友freelancer
发布时间:2022-01-07
题目内容
(请给出正确答案)
A.1
B.2
C.3
D.不存在
 更多“下述系统的能控性指数为() [图]A、1B、2C、3D、不存…”相关的问题
更多“下述系统的能控性指数为() [图]A、1B、2C、3D、不存…”相关的问题
关于下列系统能控性和能观测性说法正确的是( )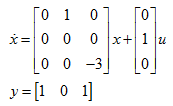
A、完全能控、不完全能观测
B、不完全能控、完全能观测
C、完全能控、完全能观测
D、不完全能控、不完全能观测
线性系统∑1和∑2互为对偶系统,则不满足的是( )。
A.∑1能控性等价于∑2能观测性 B.传递函数阵互为转置
C.∑1能观测性等价于∑2能控性 D.特征方程不相同
A、完整性控制
B、系统恢复
C、安全性控制
D、异构数据转换控制
对于n阶线性定常系统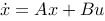 ,下列论述错误的是( )
,下列论述错误的是( )
A、当系统矩阵A的n个特征值两两互异时,可化为对角线规范形.
B、当系统矩阵A有重特征值时,不能化为对角线规范形.
C、当系统矩阵A有重特征值,且所有特征值的几何重数等于其代数重数时,可以化为对角线规范形。
D、当系统矩阵A具有n个线性无关的特征向量时可以化为对角线规范形。
已知线性定常系统如下所示,下列论述正确的是( )
A、李亚普诺夫意义下稳定、不能控。
B、李亚普诺夫意义下稳定、能控。
C、李亚普诺夫意义下不稳定、不能控
D、李亚普诺夫意义下不稳定、能控
A、系统的渐近稳定性是由系统的结构和参数决定的。
B、完全能控且能观测的线性定常系统的渐近稳定性和BIBO稳定性是等价的。
C、李亚普诺夫方程判据是判断线性定常系统渐近稳定性的充分必要条件。
D、克拉索夫斯基定理是判断定常系统渐近稳定性的充分必要条件。
已知线性定常系统如下所示,下面说法错误的是( )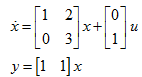
A、该系统是既能控又能观测的。
B、引入状态反馈后,不改变系统的能控性。
C、引入状态反馈 后,不改变系统的能观测性。
后,不改变系统的能观测性。
D、引入状态反馈 后,闭环传递函数出现了零极点对消的情形。
后,闭环传递函数出现了零极点对消的情形。




为了保护您的账号安全,请在“简答题”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 简答题
微信搜一搜
简答题
简答题
微信搜一搜
简答题

 如搜索结果不匹配,请
如搜索结果不匹配,请 




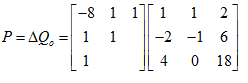
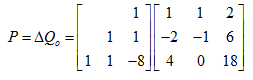
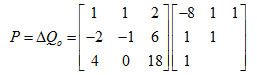
 能够将上述状态空间描述转化为能观测规范形的变换阵为( )
能够将上述状态空间描述转化为能观测规范形的变换阵为( )