 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
对进行二维平面作业的工业机器人需要几个自由度()。
A.两个
B.三个
C.一个
D.四个
提问人:网友heysein
发布时间:2024-02-16
题目内容
(请给出正确答案)
A.两个
B.三个
C.一个
D.四个
 更多“对进行二维平面作业的工业机器人需要几个自由度()。”相关的问题
更多“对进行二维平面作业的工业机器人需要几个自由度()。”相关的问题
二、填空题(答案要写好序号) 1、1948年,诺伯特·维纳 出版了①,为机器人的开发提供了理论基础。 2、第一台工业机器人诞生于①年。②和③创立了第1家机器人公司Unimation。1973年,④成功研制出了双腿走路的机器人。 3、20世纪80年代,工业机器人的四大类型机器人①、②、③、④。ABB Robotics、FANUC、Yaskawa、SIASUN ROBOT中属于中国品牌的是 ⑤ 。 4、串联机器人的构型有①、②、③、④。 5、自由度d=1的低副机构有①、②和③。在机器人系统中将运动副称为④。 6、GB/T 12643中给出的自由度的定义为:①。机器人机构能独立运动的关节的数目称为②。 7、机器人的任务空间最多有①个自由度。平面二维空间运动最多只需要②个自由度。 8、机器人的驱动方式有①驱动方式和②驱动方式。 9、机器人手部机构常用的有①、②、③、④等。 10、移动机器人的移动机构形式主要有①、②、③。
A.机器人是一种自动的、位置可控的、具有编程能力的多功能机械手,这种机械手具有几个轴,能够借助可编程序操作来处理各种材料、零件、工具和专用装置,以执行种种任务。
B.机器人是一种能够进行编程并在自动控制下执行某些操作和移动作业任务的机械装置。
C.机器人是一种用于移动各种材料、零件、工具或专用装置的,通过可编程序动作来执行种种任务的,并具有编程能力的多功能机械手。
D.工业机器人是一种装备有记忆装置和末端执行器的,能够转动并通过自动完成各种移动来代替人类劳动的通用机器。
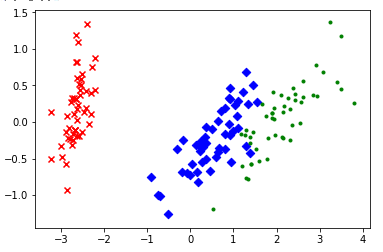
A、import matplotlib.pyplot as plt
B、from sklearn.decomposition import PCA
C、from sklearn.lda import LDA
D、import numpy as np
A、(1)(2)
B、(1)(3)
C、(1)(2)(3)
D、(1)(2)(3)(4)
A.应该采用闭环控制架构,因为闭环结构给出了将软件分解成几个协作构件的方法,这对于复杂任务特别适合
B.应该采用闭环控制结构,因为闭环控制架构中机器人的主要构件(监控器、传感器、发动机等)是彼此分开的,并能够独立替换
C.应该采用分层结构,因为分层结构很好地组织了用来协调机器人操作的构件,系统结构更加清晰
D.应该采用分层结构,因为抽象层的存在,满足了处理不确定性的需要:在较低层次不确定的实现细节在较高层次会变得确定




为了保护您的账号安全,请在“简答题”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 简答题
微信搜一搜
简答题
简答题
微信搜一搜
简答题

 如搜索结果不匹配,请
如搜索结果不匹配,请 










