 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
()函数Offs()座标方向与机器人Wobj座标系一致。
提问人:网友pangrui06
发布时间:2022-01-07
题目内容
(请给出正确答案)
 更多“()函数Offs()座标方向与机器人Wobj座标系一致。”相关的问题
更多“()函数Offs()座标方向与机器人Wobj座标系一致。”相关的问题

为了使系统阶跃响应的稳态误差为零,采用串联PI控制器
试设计合适的K1与K2值,使系统阶跃响应的超调量不大于5%,调节时间小于6s ( Δ=2%),静态速度误差系数Ku≥0.9。
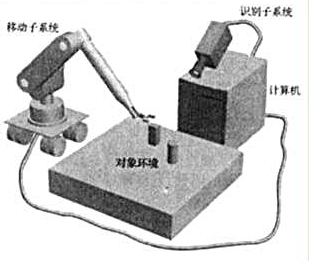
图6-26机器人和视觉系统

图10-7空间机器 人的机械臂控制系统
设计要求:
(1)当Gc(s) =K时,确定K的合适取值,使系统阶跃响应的超调量σ%=4.5% ;
(2)采用ITAE优化方法,并选取ωn=10,设计合适的PD控制器Gc(s),确定对应的前置滤波器Gp(s);
(3)采用ITAE优化方法,设计合适的Pl控制器Gc(s)和相应的前置滤波器Gp(s);
(4)采用ITAE优化方法和ωn=10,设计合适的PID控制器Gc(s) 和前置滤波器Gp (s);
(5)对比上述每种设计效果,列表比较系统对单位阶跃输入响应的σ%, tpp, ts(Δ=2%)以及由单位阶跃扰动引起的输出y (t) 的最大值和稳态值。




为了保护您的账号安全,请在“简答题”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 简答题
微信搜一搜
简答题
简答题
微信搜一搜
简答题

 如搜索结果不匹配,请
如搜索结果不匹配,请 










